Note: The color sensor included in the Matrix Future Innovators Set is V3. It supports both RGBC (Red, Green, Blue, Clear) and HSV (Hue, Saturation, Value) readings. Additionally, it features a Color ID mode, which returns a specific number corresponding to a detected color.
Sample Code
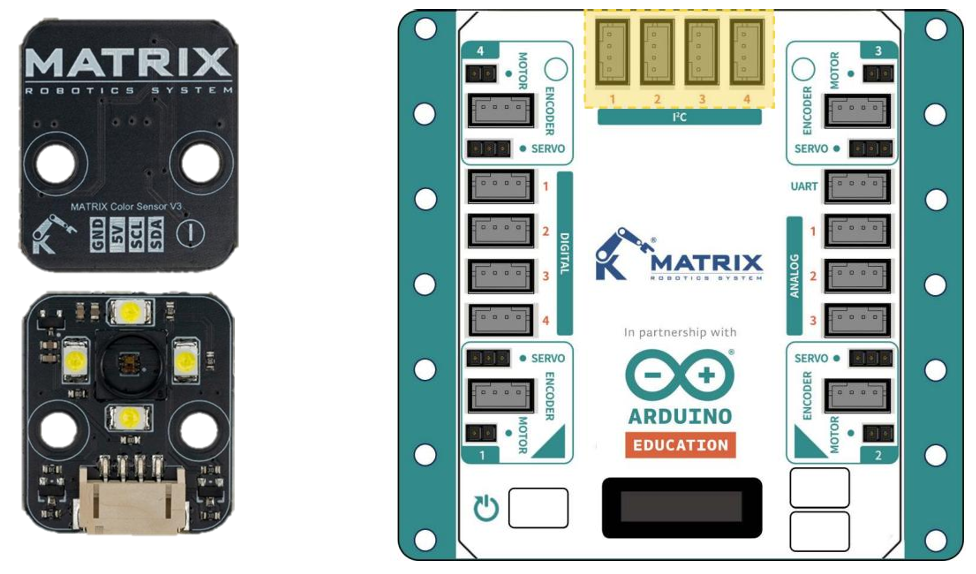
Hardware Connection: Connect the Color Sensor to the I2C1 port of the MATRIX Mini R4.
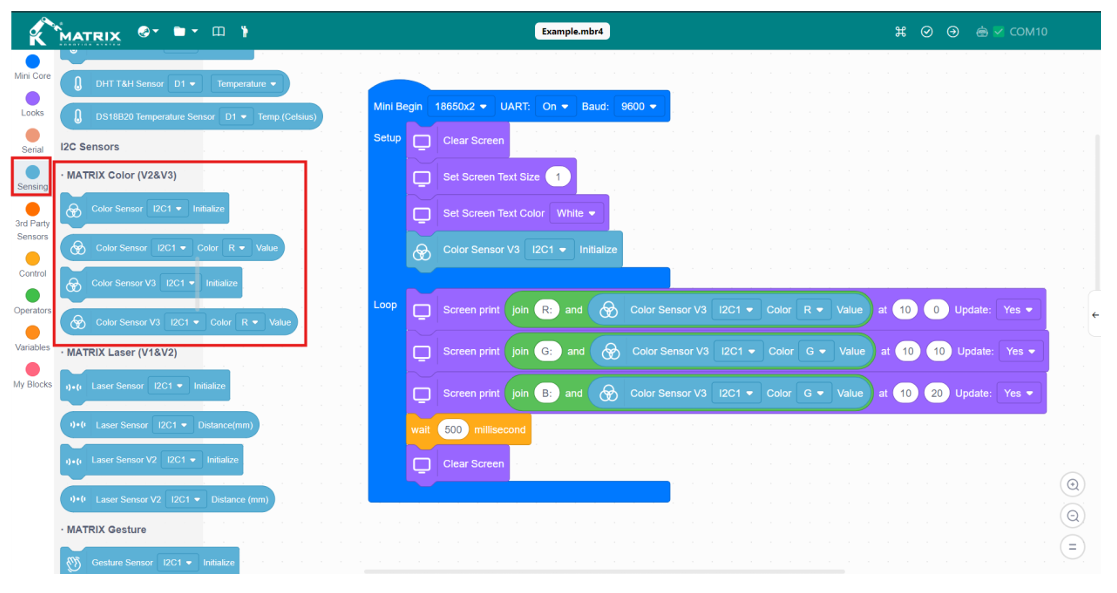
Result: The Color Sensor RGB value will be shown on the OLED under each other.
Specification
| Parameter | Min | Typ | Max | Units |
|---|---|---|---|---|
| Supply voltage (VCC) | 3 | 3.3 | 5 | V |
| Red channel wavelength | - | 465 | - | Nm |
| Green channel wavelength | - | 525 | - | Nm |
| Blue channel wavelength | - | 615 | - | Nm |
| I2C operating speed | 100 | - | 400 | KHz |
| I2C low-level input voltage | -0.5V | - | 0.33*VCC | - |
| I2C high-level input voltage | 0.7*VCC | - | VCC | - |