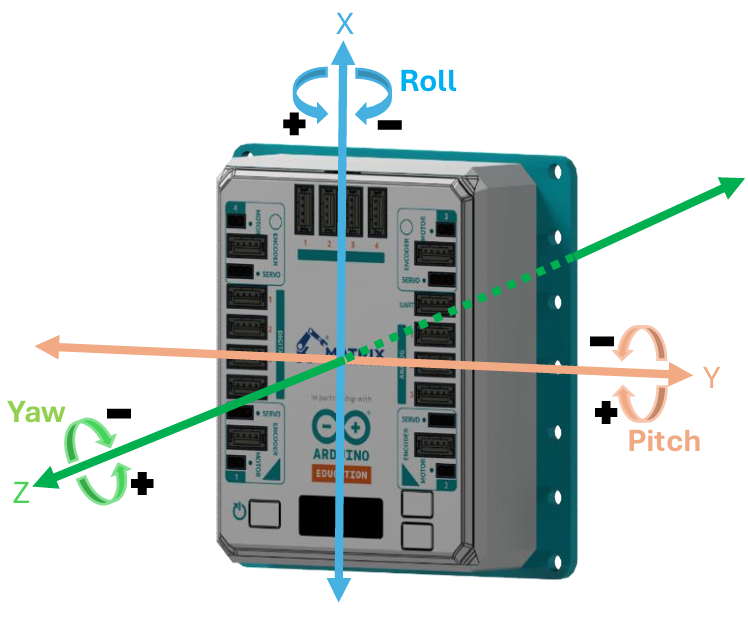
Note: The MATRIX Mini R4 features a built-in IMU (Inertial Measurement Unit) that tracks both movement and orientation in space. It measures acceleration along the X, Y, and Z axes, as well as angular velocity, how quickly the device is rotating, and calculates the angle of rotation around each axis.
Using the acceleration data, you can understand how the device is moving along each axis. The gyroscope measures rotation speed in degrees per second, and by combining this data, the IMU provides Euler angles to describe the device’s orientation, how it is tilted or turned.
These angles are:
• Roll: Rotation around the X-axis
• Pitch: Rotation around the Y-axis
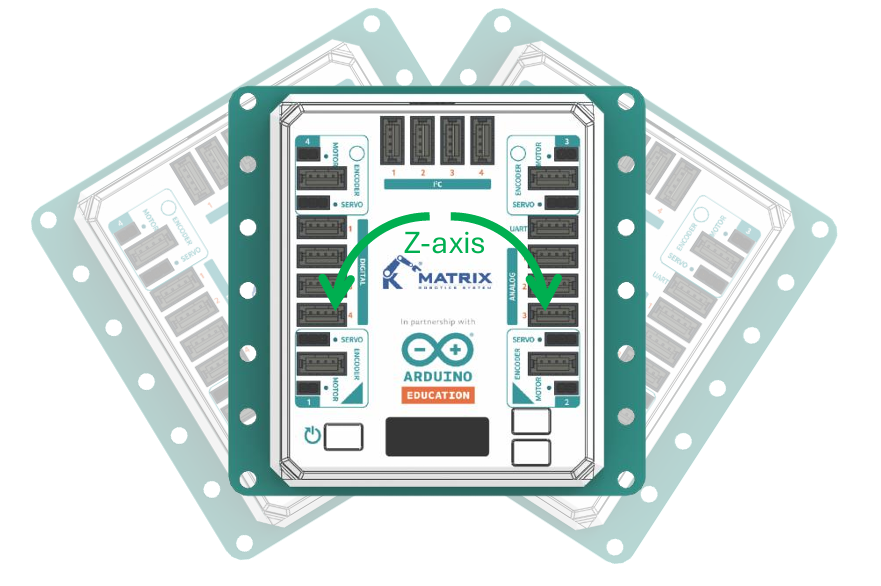
• Yaw: Rotation around the Z-axis
Below is an example of rotation around the Z-axis, which causes a change in the yaw value.
Sample Code
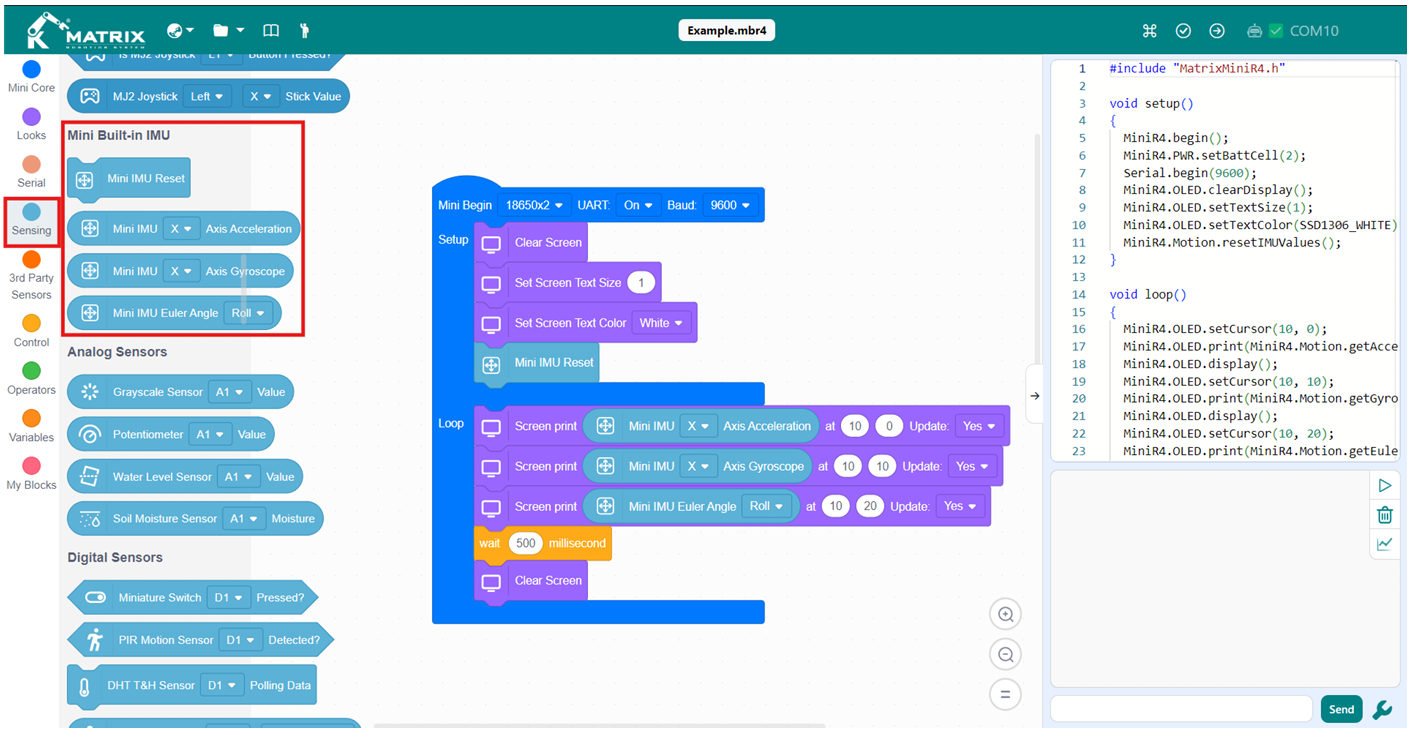
Result: The OLED will display the acceleration on the X-axis, the gyroscope data on the X-axis, and the roll value from the Euler angles.
Note: In the current firmware, the IMU reset function is set by default to the horizontal position. Otherwise, it cannot be reset.
Specifications
| Parameter | Min | Typ | Max | Units |
|---|---|---|---|---|
| Supply voltage (VCC) | 3 | 3.3 | 5 | V |
| Sample rate | - | 100 | - | Hz |
| Acceleration measurement range | -4 | - | 4 | g |
| Angular rate measurement range | -2000 | - | 2000 | dps |